Dieses System wird von mir zur Zeit verwendet.
Obwohl ich die Software noch weiter entwickle, ist diese Steuerung bereits im Einsatz.
Das Wichtigste ist fertig und es werden nur neue Funktionen hinzugefügt.
Der größte Teil der Software stammt vom Vorgängermodell III.
Der wesentliche Unterschied sind die Schrittmotortreiber A3973SB von Allegro und ein neues Bedienteil.
Das Bedienteil ist nun mit zwei Schieberegistern ausgerüstet, die vom Hauptprozessor über ein 9-adriges Kabel (statt 15) angesteuert werden.
Beim Vorgängermodell III schien die Pulsbreitenansteuerung der Motortreiber (Infineon TCA3727) die interne Stromregelung zu stören.
Obwohl der AVR-Prozessor sehr exakt bemessene Impulse erzeugte, war es nicht möglich, eine sinusförmigen Stromverlauf zu erreichen.
Im Halbschrittbetrieb funktionierten die Treiberchips perfekt bis zu hohen Schrittfrequenzen, aber gleichmäßiger Mikroschrittbetrieb war nicht erreichbar.
Im Gegensatz dazu sind die Allegro-Bausteine speziell für Mikroschrittbetrieb entwickelt worden.
Sie haben zwei DA-Wandler eingebaut, welche Referenzspannungen zur Regelung der Motorströme in 63 Stufen erzeugen können.
Die Stromregelung kann mit Taktfrequenzen bis zum Ultraschallbereich arbeiten, wodurch der Antrieb besonders beim langsamen Nachführen sehr leise ist.
Der Prozessor ist ein Atmel AVR mega128 wie im Modell III.
Die Software allein braucht nur 40 von den 128 kBytes Programmspeicher und würde in einen kleineren Prozessor passen,
aber die NGC/IC-Objektkataloge füllen den restlichen Platz fast aus.
Der mega128 hat 64 Anschlusspins und ist nur als 'Thin Plastic Quad Flat Package' (TQFP) bit 0.8mm Abstand zwischen den Pins lieferbar.
Weil die Platine nur auf einer Seite Leiterbahnen hat, habe ich den Prozessor auf die Unterseite platziert.
Das Bedienteil hat acht Tasten und eine Anzeige mit 2x8 Zeichen (HD44780-kompatibel).
Die Anzeige und die Tasten sind mit zwei Schieberegistern (74595, 74166) verbunden, die vom Hauptprozessor über das Kabel gesteuert werden.
Die Kommunikation hat im Test über ein 10 Meter langes Kabel ohne Störungen funktioniert
und ist schnell genug.
Alle Grundfunktionen können von einem Menü auf dem Bedienteil erreicht werden.
Ein PC wird nur zur Konfiguration der Steuerung gebraucht.
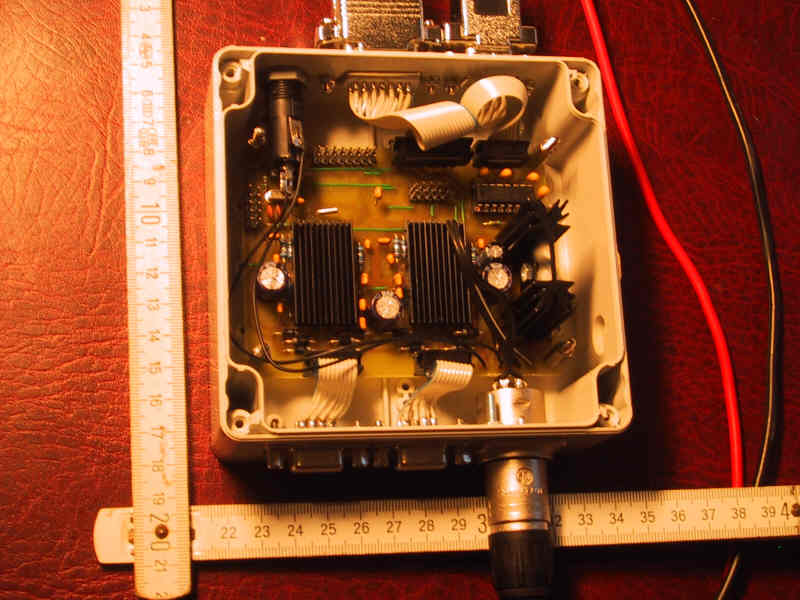
Hauptplatine der Steuerung
Die Hauptplatine der Steuerung ist klein, sie misst nur 100x80 mm. Ich verwende die Freeware-Lizenz des Layoutprogramms Eagle (www.cadsoft.de),
welche auf diese Platinengröße begrenzt ist.
Die kleinen Kühlkörper (Wärmewiderstand 13 K/W, 33x18.9 mm) sind auf die Motortreiber geklebt. Dies ist nicht die bevorzugte Art, diese Chips zu kühlen,
im Datenblatt wird eine große Kupferfläche auf der Platine dafür empfohlen. Weil die Motorströme auf 750mA statt der maximal möglichen 1000mA begrenzt sind,
außerdem zusätzliche Freilaufdioden vorhanden sind, werden die ICs nicht zu heiß.
Der dritte Kühler rechts (11 K/W, 35x12.7mm) trägt den Spannungsregler 7805, der 5 Volt aus der Eingangsspannung von 24 Volt erzeugt.
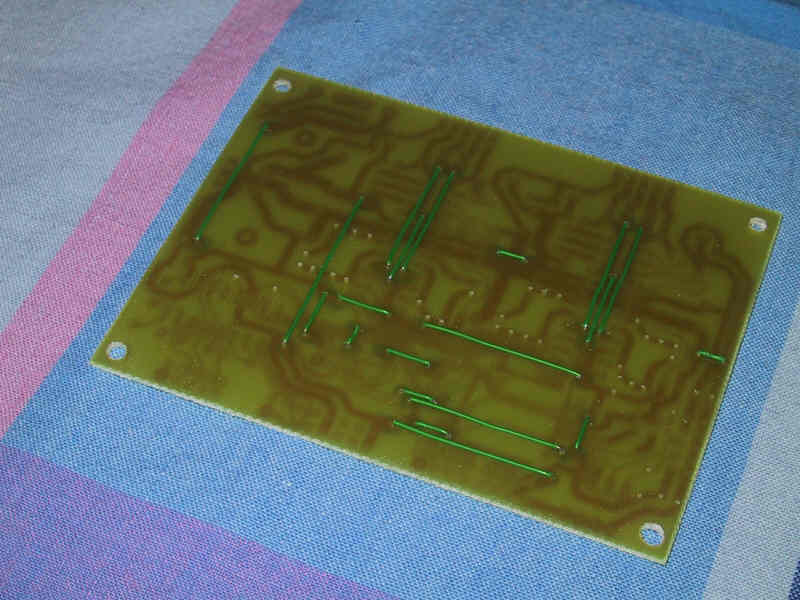
Herstellung der Hauptplatine
Weil auf einer einseitigen Platine nicht alle Verbindungen kreuzungsfrei verlegt werden konnten, sind 20 Drahtbrücken zusätzlich auf der Oberseite einzulöten.
Eigenschaften der Steuerung in Kürze
Kompaktes, allein lauffähiges System
Die Steuerung kann unabhängig benutzt werden, ohne dass ein PC für Berechnungen oder als Objektdatenbank gebraucht wird.
Zwei in Reihe geschaltete 12V-Batterien reichen als Spannungsversorgung aus.
Koordinaten-Berechnungen
Nach einer Ausrichtung an zwei Referenzsternen werden Himmelskoordinaten (Rektaszension, Deklination) angezeigt und das Teleskop wird automatisch nachgeführt. Die Position des Beobachters oder die Uhrzeit müssen nicht eingegeben werden.
Achsenfehler der Montierung (Z1, Z2) kann man über die serielle Verbindung mit einem Terminalprogramm dauerhaft einstellen
Die Berechnungen erfolgen mit doppelt genauen Fließkommazahlen (IEEE 64bit-Format) und sind dadurch auf jeden Fall genau genug.
Einfache Bedienung
Der Benutzer kann das Bedienteil zwischen zwei Betriebsarten umschalten:
1. BEWEGEN:
Das Display zeigt die aktuelle Position am Himmel und das Teleskop wird mit den vier Richtungstasten gesteuert.
Eine von fünf Geschwindigkeitsstufen ist wählbar durch Drücken der PLUS- (schneller) oder MINUS-Taste (langsamer).
2. MENUE:
Die Richtungstasten steuern ein Menü für weitergehende Funktionen.
Goto-Funktion mit Deek Sky Objektdatenbank
280 Referenzsterne, alle Messier-, NGC- und IC-Objekte können angefahren werden,
ferner einige Galaxienhaufen, Dunkelwolken und Planetarische Nebel (Abell).
Das Laden von benutzerdefinierten Objektlisten ist in Planung.