This is my currently used system. Although the development of the software is still going on I already use it for observing with my telescope. The basic functions work without errors and only new features will be added.
Most parts of the software are taken from controller III. The main differences are the stepper drivers A3973SB from Allegro and a new handbox. The handbox now has two 8 bit shift registers which are controlled by the main CPU over a 9 wire cable (instead of 15).
In controller III it seemed to me that doing PWM on the Infineon TCA3727 drivers interfered with their internal current regulation mechanism. Although the AVR controller generated very exact PWM timings with a high resolution it was impossible to get sinusoidal motor currents. At halfstep mode the drivers worked perfectly up to high speeds but smooth microstepping was not achievable.
In contrast the Allegro parts are specifically designed for microstepping. They have two integrated DA converters which can generate reference voltages to control the motor currents in 63 steps. The current regulation can be done at ultrasonic frequencies which makes the motors track very quietly.
The CPU is an Atmel AVR mega128 like in controller III. The software alone takes only 40 of the 128 kBytes program memory and would fit in a smaller CPU but the NGC/IC object catalogues fill most of the rest.
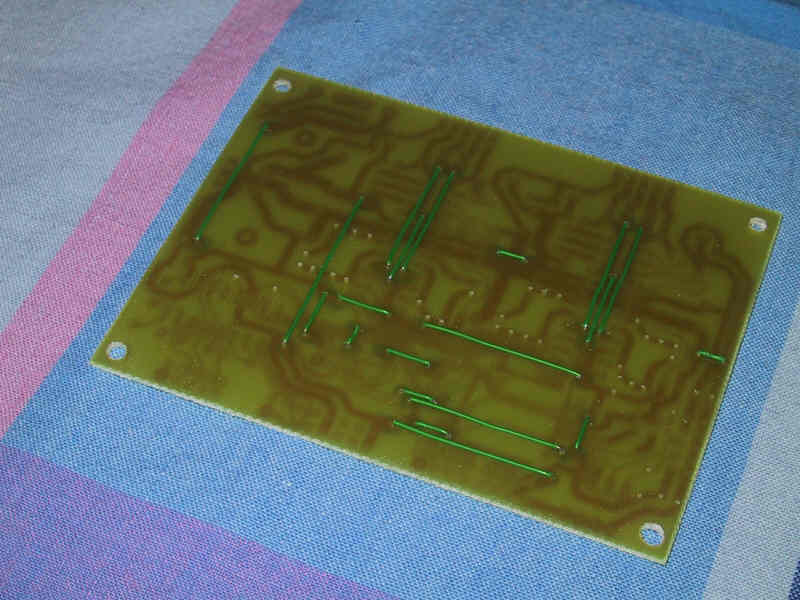
The mega128 has 64 pins and is available only as 'Thin Plastic Quad Flat Package' (TQFP) with 0.8mm (0.0315")
pitch for surface mounting. Because the circuit board has only one copper side the CPU is soldered on the back.
The handbox has eight buttons and a 2x8 character display (HD44780 compatible).
The LCD and the buttons are connected to shift registers (74595, 74166) in the handbox
which are controlled by the main CPU.
In tests over a 30 feet long cable this communication worked without problems and was fast enough.
All basic functions can be accessed from a menu on this handbox. A external PC is needed only for configuration of the controller.
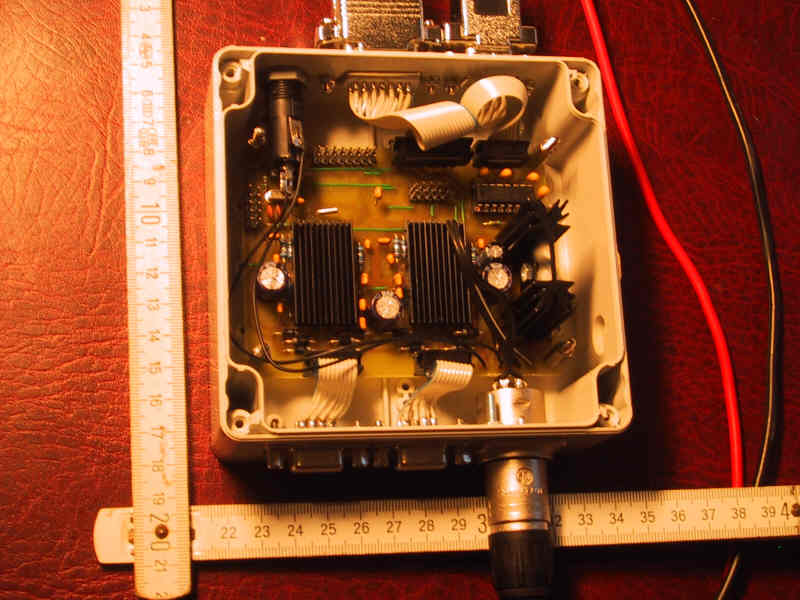
(The rule shows centimeters, not inches)
Main controller box
The main board of the controller is small, measuring only 100x80 mm (4" x 3"). I used the freeware release of the layout program Eagle (www.cadsoft.de), which is limited to this board size.
The small coolers (thermal resistance 13 K/W, 33x18.9 mm) are glued on top of the motor driver ICs. This is not the prefered way to cool these chips, the datasheet recommends a large copper area for this purpose. Because the motor currents are limited to 750mA instead of the 1000mA maximum and additional external free wheeling diodes exist the ICs don't get too hot.
The third cooler on the right (11 K/W, 35x12.7mm) is needed for the 7805 voltage regulator which generates the 5V from the single 24V supply.
Making of the controller board
Because a single sided board cannot provide all connections 20 wire bridges had to be added on the top side of the board.
Main features of the controller
Compact standalone system
The controller can be used independently without using a PC for calculations or as an object database.
Two 12V batteries in series connection are sufficient to power it.
Coordinate Transformations
After a two star alignment the system uses/displays sky coordinates (RA/DEC) and tracks automatically.
Entering the observer's position or date and time is not necessary.
Mount fabrication errors Z1 and Z2 can be permanently set with a terminal program and a RS232 connection.
The calculations use double precision floating point numbers (IEEE 64bit format) and give by far enough resolution.
Simple user interface
The user can switch the handbox between two modes:
1. MOVE mode:
The LCD shows the current sky position and the telescope is controlled with the four direction keys.
One of five speed levels is selectable by pressing the PLUS (faster) or MINUS (slower) key.
2. MENU mode:
The direction key navigate in a menu for advanced functions.
Goto function with deep sky object database
64 alignment stars, all Messier, NGC and IC objects can be selected.
Additional list contain some galaxy clusters, dark nebulae and planetary nebulae (Abell).
Download of user defined lists is planned.